
_____________________
This project was conducted in conjuction with Dr. Rajkumar Kubendran from the University of Pittsburgh as a continuation of Dr. Kubendran's research on neuromorphic computing. The project was aimed at quadraped locomotion using bio-mimetic neural networks for motor control.
_____________________
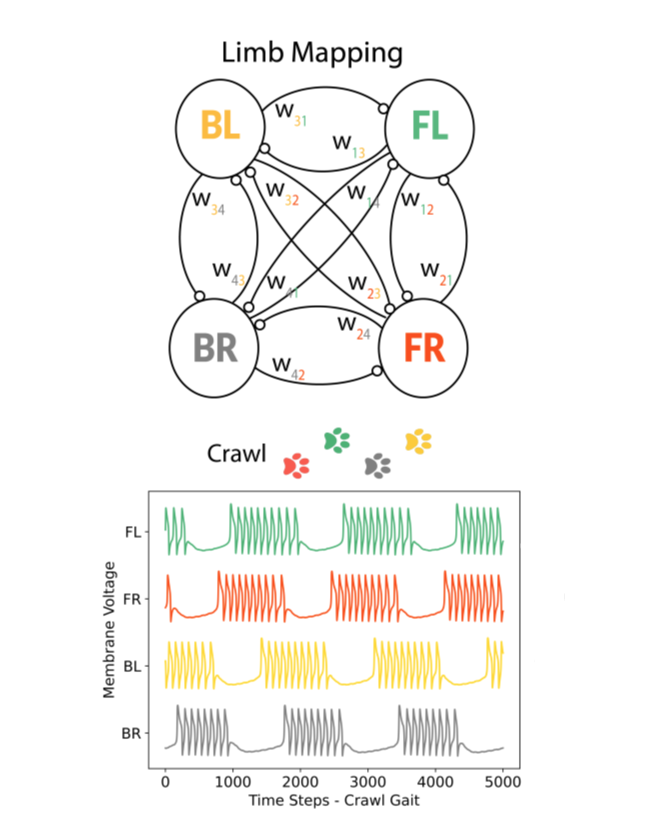
Our goal was to modify an off-the-shelf, Arduino-based robot dog kit to perform real-time, on-board motor control using a bio-mimetic neural network. To maximize efficiency and minimize physical size, an FPGA was chosen to simulate this complex network for real-time calculations.
_____________________
Our team consisted of several engineers and computer scientists, with the project being managed and directed by myself. Additionally, techincal support was provided by Dr. Kubendran and, financial support was provided by the IDEA Lab.
Due to heavy time contraints, we had to pivot from our FPGA development and instead switch to side-loading an executable script along with values that were pre-calculated by a C++ algorithm we developed. We successfully achieved motor control through the bio-mimetic network on 4/8 motors, which was limited due to memory issues that could not be addressed due to time. We produced 15+ pages of documentation so that the project can be picked up again and its original goals can come to fruition.